Energia získaná z iných zdrojov
Perpetuum mobile, zelená energia, divné stroje a podobné témy
Definujme si tému Perpetuum mobile. Z latinského prekladu, trvalo sa pohybujúce, rotujúce. To dôležité je, že výsledným pohybom je rotačný pohyb. Pokiaľ je to možné, pravidelný a silný. Iná oblasť ma nezaujala.
Mňa zaujali zariadenia, ktoré sú zostrojiteľné a nezávislé. Inak povedané, viem ho zostrojiť zo štandardných súčiastok. Teda jediná veličina, ktorá ma zaujíma je tiaž. Keďže sme storočie, ktoré nemúdrie, nazrieme do minulosti. A ak nás tam niečo zaujme, s drzosťou to vyhlásime za svoj um s tým, že iní to už nesmú používať.
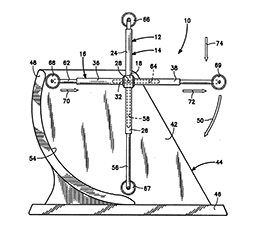 Patent No.: US 6,237,342 B1
Patent No.: US 6,237,342 B1
Ale to je asi všade. Od kuchárskych kníh, cez voľné energie, po strojové učenie. Všetko, tu už raz bolo. Legendy hovoria, že tento nie dobrý počin, vznikol po roku 1905. Vznikom prvého patentového úradu. A tam to odôvodnene začalo. A zároveň skončil pokrok.
Dnes ide iba o to, kto sa rýchlejšie dostane k dokumentom, čo najstaršieho roku. Kým ešte existoval internet a prístup k informáciám, som sa zameral na čo najstaršie dokumenty aj ja. Jedno meno za všetky, Hérón.
 Hérón Alexandrijský
Hérón Alexandrijský
Tým je vypovedané všetko. Vybral som si niekoľko typov strojov, s ktorými by sa dalo niečo robiť. Ako strojár som v nich musel vidieť perspektívne vylepšenie, ako napr. odstránenie trenia pomocou ložiska a pod. Odľahčenie konštrukcie a možný presun tiaže telesa.
• Hérón Alexandrijský, nazývaný Méchanikos (10 Alexandria - 75 Alexandria), bol staroveký matematik a vynálezca.Zaoberal sa praktickými úlohami z matematiky, mechaniky a ďalších oblastí fyziky. Pôsobil v preslávenom Museiu v Alexandrii.
Magnetický motor
Asi ako všetci som, ako prvé, skúsil magnetický motor. Jednoduché a čisté. Populárna téma. Existujúce programy. Existujúce grafické simulácie magnetických vlnoplôch. Stále však nie a nie dosiahnuť výsledok. Ja sám som nakŕmil softvér dátami. Tým najlepším rozložením magnetov, pár/nepár a získal výslednú animáciu. Písal sa rok 2014 a animácia bola oveľa zaujímavejšia, až príliš dokonalá, ako daný motor.
 Obrázok existuje aj vo farbe, ale je príliš veľký
Obrázok existuje aj vo farbe, ale je príliš veľký
Háčik toho celého, alias najväčším problémom bol sám magnet. Hľadala sa zlatá stredná cesta. Magnet nemohol byť slabý a naopak, ani moc silný. Nakoniec sa i tak, ako materiál unavil. Takže som radšej zvolil zostal pri točivých strojoch.
Točivý stroj s nevývažkom
Točivé stroje to bolo niečo reálnejšie. Plus znalosti technického parametrického kreslenia, boli viac, ako počítanie rovníc z fyziky a mechaniky. Pričom určovanie ťažiska plôch a objektov, zvládal program sám.
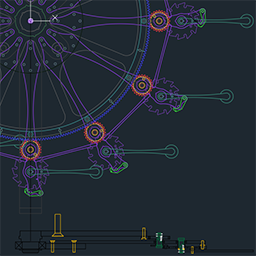
Za vzor som si vzal, už po roku 2000 patentovaný stroj. Jednalo sa o klasický rotačný stroj s riadeným nevývažkom mimo os. Žiadne guľôčky. Lenže pri rozbore som zistil, že oporná krivka nedáva dobrý výsledok. Takže som ju nahradil inou. Ako strojár som vyskúšal všetky strojárske, vrátane evolventy. No ukázalo sa, že tá najlepšia je najznámejšia špirála z prírody. Zafungovalo to.
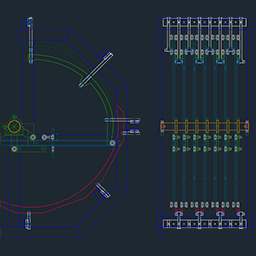 Násobenie ramien a dráhy
Násobenie ramien a dráhy
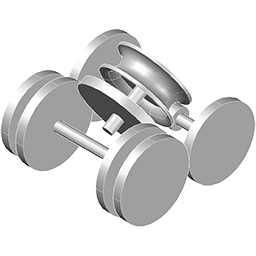
Namodeloval som všetky súčiastky v počítači. Trenie som nahradil valivým trením. Zložil som stroj a aplikoval som naň simuláciu tiaže. Jediné zaťaženie. Bolo to v SolidWorks. Stroj sa roztočil, čo bol úspech. Pridával som ďalšie sekcie. Fungovalo to do vtedy, kým počítač vyhlásil, že je toho na neho moc a koniec. Ale i tak mi to na potvrdenie postačilo.
Pokračoval som v tejto téme. Hlavný problém pri týchto strojoch je, že nepracujú plynulo. Tak tu vznikla snaha, pridať im impulz. Často vidíme také kladivká, pružiny, guľôčky a pod. Lenže takýto impulz. Známa poučka, akcia vyvoláva reakciu. Nemá sa rád s plynulosťou. Preto sa tieto stroje prepracovali na plynulé vyváženie cez dve osi. Takže sa nám to točí, ale niečo tomu chýba. Napadol ma spôsob, ako k plynulosti dodať riadený skok a zostať v plynulosti.
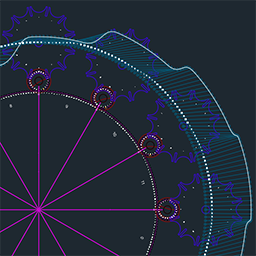 Maltézsky kríž
Maltézsky kríž
Použil som starý strojársky mechanizmus, riešenie strhovacieho mechanizmu. Silové pole, rozloženie síl, sa priaznivo presunulo. Ďalším krokom bolo pridanie hmoty na zvýšenie krútiaceho momentu. Tam som použil fyziku, protivývažok so západkou.
 Západka
Západka
A skvelo to fungovalo, teda v počítači. V reálom svete majú tieto stroje jeden spoločný problém a to je ich samotná tiaž. Váha vlastných komponentov. Tá ich limituje. Čím bude väčší a ťažší, tým skôr ním nepohneme. Všetko máme, viac menej z kovu. Aj keď som do modelu narobil množstvo odľahčovacích otvorov, nestačilo to.
Zub naviac
Po točivých strojoch, ktoré považujem za realizovateľné a funkčné, prichádza posledný. V mojich rozšírených rotačných návrhoch som postrehol v mechanizme zaujímavú vec. Zub naviac. Prevzal som ho do súkolia.
 Zub naviac
Zub naviac
Ponechal som ho spolu s iným súkolím bežať po zdanlivej rovine. Vznikol rozdiel. Tento rozdiel som zosilnil silou. A potom ma napadlo niečo zaujímavé. Prevrátením procesu som dostal pohyb rotačný. Dobrý nápad. Nenašiel som podobné zariadenie, čo by takto pracovalo. Neviem, ho ani poriadne simulovať, aby som potvrdil vlastný nápad. Tu už nejde o nevývažok, resp. tiaž, s ktorou som sa pohrával pred tým. Tu som nevývažok nahradil priamo silou. Tým tiaž celého stroja nebude mať taký dopad na výsledný krútiaci moment, čo je skvelé. Zašiel som ešte ďalej.
Zistil som, že by sa dali získavať vyššie krútiace momenty a to pridaním malých krokových motorov a senzorov. Pravdepodobne by sa dali riadiť frekvencie otáčania a hodnota krútiaceho momentu pri zaťažení. Ale to by sa už muselo nájsť technologické zázemie s vybavením a hlavne získať vedomosti ešte z dvoch technických odborov na potrebné doplňujúce výpočty. Možno, technologické centrum, ktoré by som skromne mohol aj viesť.